
kimserver 节点发现,是通过中心服务进行管理,中心管理思路清晰,逻辑相对简单,而且有很多成熟的方案,例如 zookeeper。
1. 中心管理
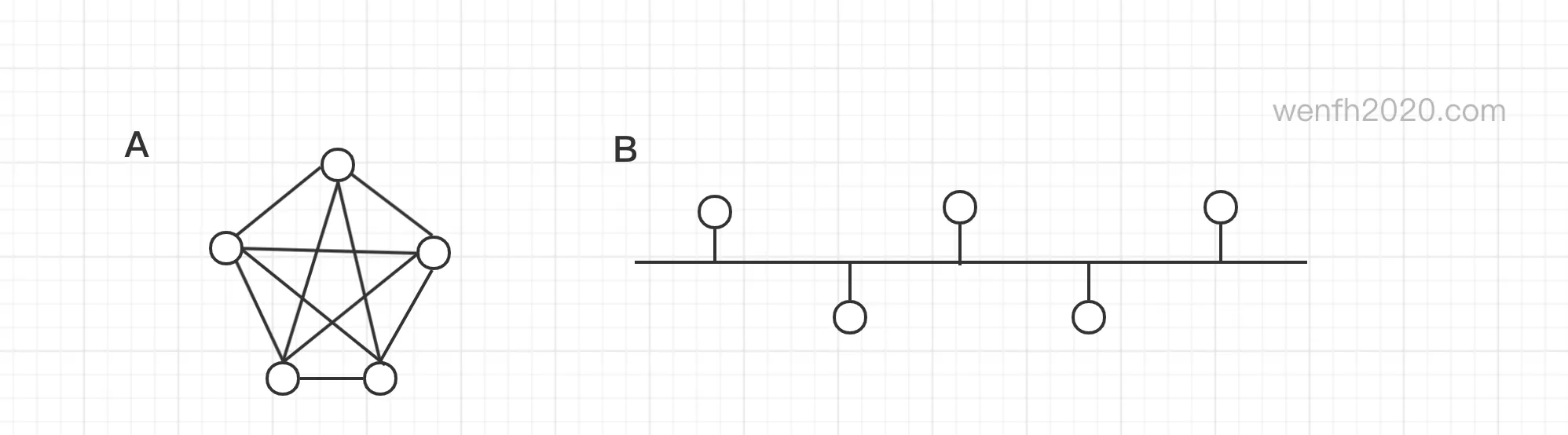
1.1. 节点关系
- 中心服务管理是 B 图的节点管理模式,关系简单,逻辑清晰。
- 当集群节点通过中心相互发现,彼此连接,那么就成了 A 图的关系模型。
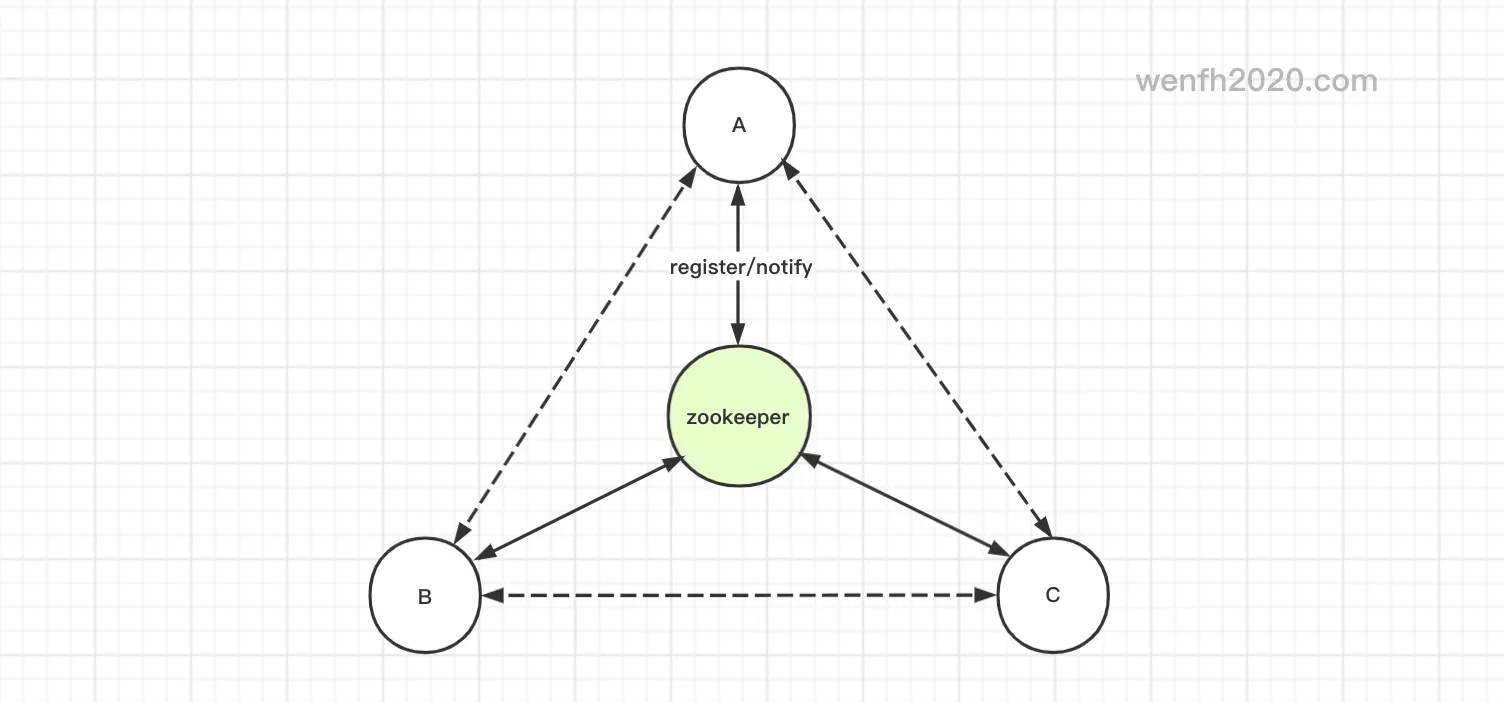
1.2. 原理
用 zookeeper(下面简称 zk)做实现节点发现原理:
- 子服务通过
zk-client向 zk 注册临时保护节点。 - 子服务从 zk 获取并监控对应节点类型下的所有子节点信息。
节点发现原理可以参考下这个帖子: 《徒手教你使用zookeeper编写服务发现》,我觉得它说得简单易懂。
1.3. zk 节点数据
- zk 节点目录结构,类似 Linux 目录管理,节点管理详细命令请通过
./zkCli.sh执行help命令。
1
/<node_root>/<node_type>/<node_data>
1
2
3
4
5
6
7
8
9
10
11
12
#[wenfh2020:~]$ sudo zkCli
#ls -R /
/zookeeper
# 服务根节点。
/kimserver
# 根节点下的节点类型。
/kimserver/gate
/kimserver/logic
# gate 节点类型下的子服务(临时保护节点)。
/kimserver/gate/kimserver-gate0000000311
# get /kimserver/gate/kimserver-gate0000000311
{"path":"/kimserver/gate/kimserver-gate0000000311","type":"gate","ip":"127.0.0.1","port":3344,"worker_cnt":1,"active_time":1606365833.263954}
- 节点数据结构(<node_data>)。
1
2
3
4
5
6
7
8
{
"path": "/kimserver/gate/kimserver-gate0000000311",
"type": "gate",
"ip": "127.0.0.1",
"port": 3344,
"worker_cnt": 1,
"active_time": 1606365833.263954
}
2. zookeeper-client-c
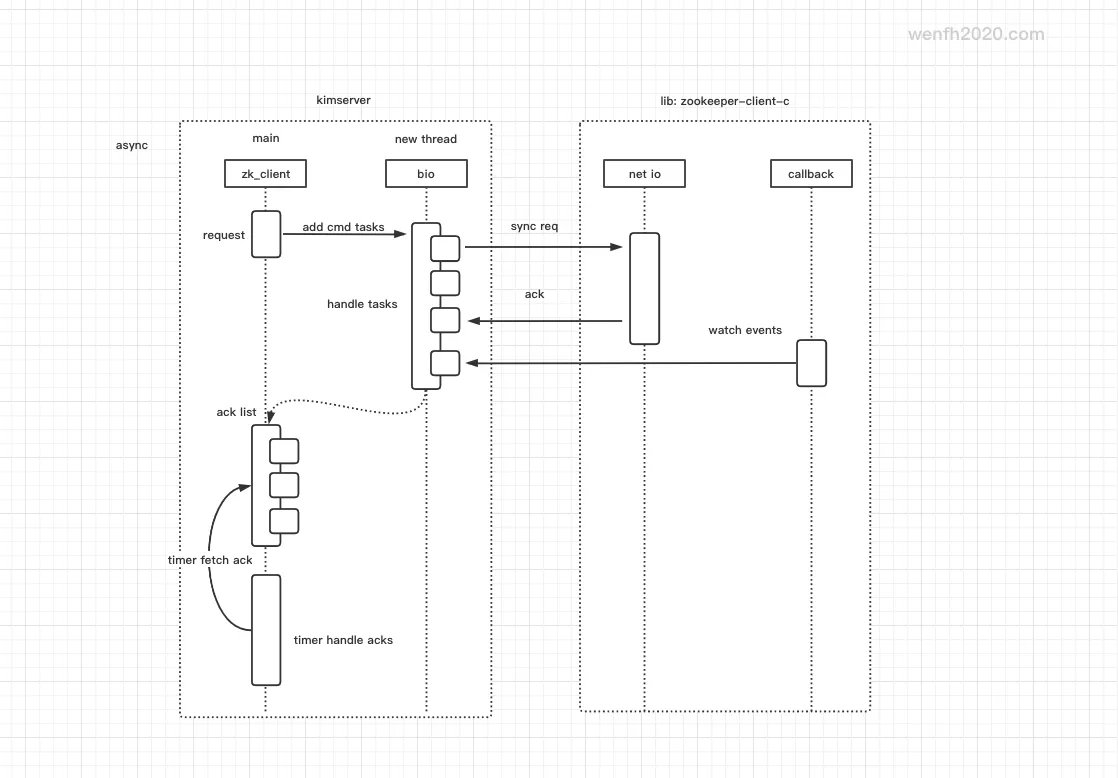
zookeeper 源码目录下有一个 zookeeper-client-c,工作模式是多线程。而 kimserver 是多进程异步服务,要整合一个多线程的 client 进来,又不能破坏原来的异步逻辑,这里确实花了不少心思。
zookeeper-client-c 工作方式,请参考 《ZooKeeper C - Client 异步/同步工作方式》
- 创建一个新的线程,调用
zookeeper-c-client的同步接口。 - 主线程向 zookeeper 发送命令,命令将以任务方式将其添加到任务队列,提供新线程消费。
- 主线程通过时钟定时消费,新线程处理任务的结果。
2.1. 日志
zookeeper-client-c 端日志数据。设置 DEBUG 等级日志,查看调用 zookeeper-client-c 注册节点的工作流程。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
# 初始化 client 连接 zk 信息。
2020-11-11 09:26:57,416:21244(0x7ff8dc3ed8c0):ZOO_INFO@zookeeper_init@827: Initiating client connection, host=127.0.0.1:2181 sessionTimeout=10000 watcher=0x44233a sessionId=0 sessionPasswd=<null> context=0x7ff8d7888500 flags=0
# 启动两条线程工作。
2020-11-11 09:26:57,416:21244(0x7ff8dc3ed8c0):ZOO_DEBUG@start_threads@221: starting threads...
2020-11-11 09:26:57,416:21244(0x7ff8d6ffe700):ZOO_DEBUG@do_completion@458: started completion thread
2020-11-11 09:26:57,420:21244(0x7ff8d77ff700):ZOO_DEBUG@do_io@367: started IO thread
2020-11-11 09:26:57,421:21244(0x7ff8d77ff700):ZOO_INFO@check_events@1764: initiated connection to server [127.0.0.1:2181]
# 检查父节点(/kimserver/gate)是否存在。
2020-11-11 09:26:57,427:21244(0x7ff8d5bff700):ZOO_DEBUG@zoo_awexists@2894: Sending request xid=0x5fab3de2 for path [/kimserver/gate] to 127.0.0.1:2181
...
# 创建临时保护节点(/kimserver/gate/kimserver-gate0000000312)
2020-11-11 09:26:57,798:21244(0x7ff8d5bff700):ZOO_DEBUG@zoo_acreate@2815: Sending request xid=0x5fab3de4 for path [/kimserver/gate/kimserver-gate] to 127.0.0.1:2181
2020-11-11 09:26:57,801:21244(0x7ff8d77ff700):ZOO_DEBUG@process_sync_completion@1929: Processing sync_completion with type=6 xid=0x5fab3de4 rc=0
# 设置节点信息(type/ip/port)。
2020-11-11 09:26:57,801:21244(0x7ff8d5bff700):ZOO_DEBUG@zoo_aset@2759: Sending request xid=0x5fab3de5 for path [/kimserver/gate/kimserver-gate0000000312] to 127.0.0.1:2181
2020-11-11 09:26:57,803:21244(0x7ff8d77ff700):ZOO_DEBUG@process_sync_completion@1929: Processing sync_completion with type=1 xid=0x5fab3de5 rc=0
# 获取并监视(watch) gate(/kimserver/gate)节点类型下的子节点变化。
2020-11-11 09:26:57,803:21244(0x7ff8d5bff700):ZOO_DEBUG@zoo_awget_children_@2927: Sending request xid=0x5fab3de6 for path [/kimserver/gate] to 127.0.0.1:2181
2020-11-11 09:26:57,805:21244(0x7ff8d77ff700):ZOO_DEBUG@process_sync_completion@1929: Processing sync_completion with type=3 xid=0x5fab3de6 rc=0
# gate(/kimserver/gate)节点类型下,有三个子节点(包括自己),获取并监控子节点的 ip/port 信息,并监控它们节点数据的变化。
2020-11-11 09:26:57,805:21244(0x7ff8d5bff700):ZOO_DEBUG@zoo_awget@2714: Sending request xid=0x5fab3de7 for path [/kimserver/gate/kimserver-gate0000000312] to 127.0.0.1:2181
2020-11-11 09:26:57,806:21244(0x7ff8d77ff700):ZOO_DEBUG@process_sync_completion@1929: Processing sync_completion with type=2 xid=0x5fab3de7 rc=0
2020-11-11 09:26:57,806:21244(0x7ff8d5bff700):ZOO_DEBUG@zoo_awget@2714: Sending request xid=0x5fab3de8 for path [/kimserver/gate/kimserver-gate0000000311] to 127.0.0.1:2181
2020-11-11 09:26:57,807:21244(0x7ff8d77ff700):ZOO_DEBUG@process_sync_completion@1929: Processing sync_completion with type=2 xid=0x5fab3de8 rc=0
2020-11-11 09:26:57,807:21244(0x7ff8d5bff700):ZOO_DEBUG@zoo_awget@2714: Sending request xid=0x5fab3de9 for path [/kimserver/gate/kimserver-gate0000000310] to 127.0.0.1:2181
# 节点掉线通知。(/kimserver/gate/kimserver-gate0000000311)
2020-11-11 09:27:08,559:21244(0x7ff8d77ff700):ZOO_DEBUG@zookeeper_process@2263: Processing WATCHER_EVENT
2020-11-11 09:27:08,559:21244(0x7ff8d77ff700):ZOO_DEBUG@zookeeper_process@2263: Processing WATCHER_EVENT
2020-11-11 09:27:08,559:21244(0x7ff8d6ffe700):ZOO_DEBUG@process_completions@2169: Calling a watcher for node [/kimserver/gate/kimserver-gate0000000311], type = -1 event=ZOO_DELETED_EVENT
# 前面监控了父节点(/kimserver/gate)的节点变化,有节点掉线了,父节点通知有子节点变化。
2020-11-11 09:27:08,559:21244(0x7ff8d6ffe700):ZOO_DEBUG@process_completions@2169: Calling a watcher for node [/kimserver/gate], type = -1 event=ZOO_CHILD_EVENT
...
# client 执行完逻辑后,通过心跳与 zk 保活。
2020-11-11 09:27:12,753:21244(0x7ff8d77ff700):ZOO_DEBUG@zookeeper_process@2255: Got ping response in 0 ms
2020-11-11 09:27:16,090:21244(0x7ff8d77ff700):ZOO_DEBUG@zookeeper_process@2255: Got ping response in 0 ms
2020-11-11 09:27:19,427:21244(0x7ff8d77ff700):ZOO_DEBUG@zookeeper_process@2255: Got ping response in 0 ms
2.2. 源码实现
从上图可以看出,这个功能的实现流程,注册逻辑主要通过 node_register() 函数实现,详细实现请查看 源码,这里简单介绍一下对应的逻辑。
- 异步服务接口逻辑。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
class ZkClient : public Bio {
public:
ZkClient(Log* logger);
virtual ~ZkClient();
/* 初始化 zk client 的封装,从配置文件读取对应的信息。 */
bool init(const CJsonObject& config);
public:
/* 连接 zookeeper 服务,这个是异步的。 */
bool connect(const std::string& servers);
/* 断线重连 */
bool reconnect();
/* 节点注册逻辑。 */
bool node_register();
/* zk 日志设置,注意要在 zookeeper-client-c 连接前调用,是 client 里面的独立日志。 */
void set_zk_log(const std::string& path, utility::zoo_log_lvl level = utility::zoo_log_lvl_info);
/* bio 线程调用同步接口处理任务队列的任务。 */
virtual void process_cmd(zk_task_t* task) override;
/* 时钟事件。 */
virtual void on_repeat_timer() override;
/* 时钟定时处理任务结果。 */
virtual void process_ack(zk_task_t* task) override;
/* zookeeper-client-c 回调线程回调通知. */
static void on_zookeeper_watch_events(zhandle_t* zh, int type, int state, const char* path, void* privdata);
void on_zk_watch_events(int type, int state, const char* path, void* privdata);
/* 时钟处理任务处理结果或者 zookeeper 通知事件. */
void on_zk_register(const kim::zk_task_t* task);
/* 向 zk 服务获取对应节点信息。 */
void on_zk_get_data(const kim::zk_task_t* task);
/* zk 通知:关注的节点内容变动。 */
void on_zk_data_change(const kim::zk_task_t* task);
/* zk 通知:关注的节点类型下的子节点有新增或删除。 */
void on_zk_child_change(const kim::zk_task_t* task);
/* zk 通知:关注的节点被删除。 */
void on_zk_node_deleted(const kim::zk_task_t* task);
/* zk 通知:注册成功,成功在 zk 服务创建临时保护节点。 */
void on_zk_node_created(const kim::zk_task_t* task);
/* zk 通知:节点已成功连接 zk 服务。 */
void on_zk_session_connected(const kim::zk_task_t* task);
/* zk 通知:网络问题,正在努力连接。*/
void on_zk_session_connecting(const kim::zk_task_t* task); /* reconnect. */
/* zk 通知:节点过期,说明节点已下线或者崩溃。 */
void on_zk_session_expired(const kim::zk_task_t* task);
private:
/* bio 线程处理当前服务注册 zk 服务临时保护节点逻辑。 */
utility::zoo_rc bio_register_node(zk_task_t* task);
private:
/* 服务配置。 */
CJsonObject m_config;
/* 节点信息管理。 */
Nodes* m_nodes = nullptr;
/* zookeeper-client-c 接口封装 */
utility::zk_cpp* m_zk;
bool m_is_connected = false;
bool m_is_registered = false;
bool m_is_expired = false;
int m_register_index = 0; /* for reconnect. */
};
- 后台线程(Bio)处理同步逻辑。Bio 这个类参考了 redis 的 bio 线程实现。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
/* 添加任务接口。 */
bool Bio::add_cmd_task(const std::string& path, zk_task_t::CMD cmd, const std::string& value) {
zk_task_t* task = new zk_task_t{path, value, cmd, time_now()};
if (task == nullptr) {
LOG_ERROR("new task failed! path: %s", path.c_str());
return false;
}
/* 任务添加到任务队列,提供后台线程消费。 */
pthread_mutex_lock(&m_mutex);
m_req_tasks.push_back(task);
pthread_cond_signal(&m_cond);
pthread_mutex_unlock(&m_mutex);
return true;
}
/* bio 后台线程处理同步任务。 */
void* Bio::bio_process_tasks(void* arg) {
...
while (!bio->m_stop_thread) {
zk_task_t* task = nullptr;
pthread_mutex_lock(&bio->m_mutex);
while (bio->m_req_tasks.size() == 0) {
/* wait for pthread_cond_signal. */
pthread_cond_wait(&bio->m_cond, &bio->m_mutex);
}
task = bio->m_req_tasks.front();
bio->m_req_tasks.pop_front();
pthread_mutex_unlock(&bio->m_mutex);
if (task != nullptr) {
/* 同步处理命令任务逻辑。 */
bio->process_cmd(task);
/* 任务处理完成,把任务添加到任务完成队列。 */
bio->add_ack_task(task);
}
}
...
}
/* 时钟处理完成任务队列。 */
void Bio::on_repeat_timer() {
/* acks */
handle_acks();
}
void Bio::handle_acks() {
int i = 0;
std::list<zk_task_t*> tasks;
/* fetch 100 acks to handle. */
pthread_mutex_lock(&m_mutex);
while (m_ack_tasks.size() > 0 && i++ < 100) {
tasks.push_back(m_ack_tasks.front());
m_ack_tasks.pop_front();
}
pthread_mutex_unlock(&m_mutex);
for (auto& v : tasks) {
process_ack(v);
SAFE_DELETE(v);
}
}