
zookeeper 有 zookeeper-client-c,它可以被编译成静态库进行工作。
client 提供了两种接口:同步 / 异步。同步和异步接口都是通过多线程实现。下面通过走读源码,理解它们的工作方式,这样方便我们对它进行二次封装。
1. Linux 安装
zookeeper-client-c 在 zookeeper 的子目录下。
- 安装脚本。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
yum install -y ant
yum install -y cppunit-devel
yum install -y cmake
yum install -y libtool
# 下载的是 2018 年的版本,最新版本根据文档,执行 ant 命令会失败。
wget https://github.com/apache/zookeeper/archive/release-3.4.13.tar.gz
tar zxf release-3.4.13.tar.gz
cd zookeeper-release-3.4.13
ant clean jar
ant compile_jute
cd src/c
autoreconf -if
./configure
make && make install
- 安装结果。
1
2
3
4
5
6
7
8
9
# 安装静态库到 /usr/local/lib/ 目录下。
libtool: install: /usr/bin/install -c .libs/libzookeeper_st.a /usr/local/lib/libzookeeper_st.a
...
libtool: install: /usr/bin/install -c .libs/libzookeeper_mt.a /usr/local/lib/libzookeeper_mt.a
...
# 安装对应的头文件到 /usr/local/include 目录下。
/usr/bin/mkdir -p '/usr/local/include/zookeeper'
/usr/bin/install -c -m 644 include/zookeeper.h include/zookeeper_version.h include/zookeeper_log.h include/proto.h include/recordio.h generated/zookeeper.jute.h '/usr/local/include/zookeeper'
2. 使用
zookeeper-client-c 同步接口使用,需要添加编译宏 THREADED。
这里是别人的封装的轻量级 同步 C++ 测试源码。
2.1. 编译脚本
- 添加宏
THREADED。 - 添加静态库
zookeeper_mt。
1
2
# 测试源码编译脚本。
g++ -g -std='c++11' -DTHREADED zk_cpp_test.cpp zk_cpp.cpp -lzookeeper_mt -o test_zk
2.2. 测试源码
即便是同步使用方式,也有部分异步回调的接口。因为监控的节点变化和节点数据变化不是实时发生的。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
/* 监控节点数据变化。 */
void data_change_event(const std::string& path, const std::string& new_value) {...}
/* 监控父节点的子节点变化(添加/删除)。 */
void child_change_events(const std::string& path, const std::vector<std::string>& children) {...}
/* zk_cpp_test.cpp */
int main() {
...
/* 创建 zk client 对象。 */
utility::zk_cpp zk;
do {
/* 初始 zk client 对象。 */
utility::zoo_rc ret = zk.connect(urls);
...
std::string cmd;
while (std::cin >> cmd) {
...
else if (cmd == "get") {
/* 同步获取节点接口。 */
utility::zoo_rc ret = zk.get_node(path.c_str(), value, nullptr, true);
}
...
else if (cmd == "watch_data") {
/* 同步返回当前数据,记录下回调函数,当节点数据有变化异步回调。 */
utility::zoo_rc ret = zk.watch_data_change(path.c_str(), data_change_event, &value);
}
else if (cmd == "watch_child") {
/* 同步返回当前数据,记录下回调函数,当节点数据有变化异步回调。 */
utility::zoo_rc ret = zk.watch_children_event(path.c_str(), child_change_events, &children);
}
...
}
} while (0);
...
}
3. zookeeper-client-c 源码分析
3.1. 创建子线程
zookeeper-client-c 初始化时,会创建两个子线程。换句话说,只要使用这个库,最少得有三个线程:主线程 + 两个子线程。
- 网络线程:客户端网络读写 IO。
- 回调线程:已处理完成的请求放进完成队列,进行异步回调。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
/* zookeeper.c */
zhandle_t *zookeeper_init(const char *host, ...) {
...
return zookeeper_init_internal(...);
...
}
static zhandle_t *zookeeper_init_internal(...) {
...
if (adaptor_init(zh) == -1) {
goto abort;
}
...
}
int adaptor_init(zhandle_t *zh) {
...
start_threads(zh);
return 0;
}
/* 启动两个子线程分别处理:客户端请求,服务回调。 */
void start_threads(zhandle_t *zh) {
...
/* 处理客户端网络读写 io。 */
rc = pthread_create(&adaptor->io, 0, do_io, zh);
/* 已处理完成的包会放进完成队列,让另外一个线程进行处理。 */
rc = pthread_create(&adaptor->completion, 0, do_completion, zh);
...
}
3.2. 同步异步接口
zk client 与 zk server 通信常用接口。
| 同步 | 异步 | 描述 |
|---|---|---|
| zoo_create | zoo_acreate | 创建节点。 |
| zoo_get | zoo_aget | 获取节点数据。 |
| zoo_exists | zoo_aexists | 检查节点是否存在。 |
| zoo_delete | zoo_adelete | 删除节点。 |
| zoo_get_children | zoo_aget_children | 获取节点的孩子节点。 |
| zoo_set_acl | zoo_aset_acl | 设置权限控制。 |
| zoo_get_acl | zoo_aget_acl | 获取节点的权限。 |
| \ | zoo_add_auth | 添加认证,如果认证失败,会异步回调,并断开连接。 |
参考节点删除接口,其它接口实现方式大同小异。
-
接口设计风格。
同步接口
zoo_delete,异步接口zoo_adelete,接口设计比较简约,接口有前缀zoo_,异步接口在zoo_后面多了个a。 -
同步。
zoo_delete同步接口,调用了异步接口zoo_adelete。同步方式其实是给异步接口上锁,直到接口流程处理完毕,才解锁。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
/* zookeeper.h */
ZOOAPI int zoo_delete(zhandle_t *zh, const char *path, int version);
/* zookeeper.c */
int zoo_delete(zhandle_t *zh, const char *path, int version) {
/* 创建锁对象。 */
struct sync_completion *sc = alloc_sync_completion();
int rc;
if (!sc) {
return ZSYSTEMERROR;
}
/* 调用异步接口。 */
rc = zoo_adelete(zh, path, version, SYNCHRONOUS_MARKER, sc);
if (rc == ZOK) {
/* 上锁睡眠,直到处理完服务回复才被唤醒。 */
wait_sync_completion(sc);
rc = sc->rc;
}
/* 释放锁对象。 */
free_sync_completion(sc);
return rc;
}
/* 创建锁。 */
struct sync_completion *alloc_sync_completion(void) {
struct sync_completion *sc = (struct sync_completion *)calloc(1, sizeof(struct sync_completion));
if (sc) {
pthread_cond_init(&sc->cond, 0);
pthread_mutex_init(&sc->lock, 0);
}
return sc;
}
/* mt_adaptor.c */
int wait_sync_completion(struct sync_completion *sc) {
/* 上锁。 */
pthread_mutex_lock(&sc->lock);
/* 没处理完进入睡眠状态,等待唤醒。 */
while (!sc->complete) {
pthread_cond_wait(&sc->cond, &sc->lock);
}
/* 解锁。 */
pthread_mutex_unlock(&sc->lock);
return 0;
}
/* 释放锁。 */
void free_sync_completion(struct sync_completion *sc) {
if (sc) {
pthread_mutex_destroy(&sc->lock);
pthread_cond_destroy(&sc->cond);
free(sc);
}
}
- 异步
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
/* 回调函数。 */
typedef void (*void_completion_t)(int rc, const void *data);
/* zookeeper.h */
ZOOAPI int zoo_adelete(zhandle_t *zh, const char *path, int version,
void_completion_t completion, const void *data);
/* zookeeper.c */
int zoo_adelete(zhandle_t *zh, const char *path, int version,
void_completion_t completion, const void *data) {
/* 内存序列化对象。 */
struct oarchive *oa;
/* 请求包头。 */
struct RequestHeader h = {get_xid(), ZOO_DELETE_OP};
/* 请求包内容。 */
struct DeleteRequest req;
int rc = DeleteRequest_init(zh, &req, path, version);
if (rc != ZOK) {
return rc;
}
/* 创建内存序列化对象,序列化写入包头和包内容。 */
oa = create_buffer_oarchive();
rc = serialize_RequestHeader(oa, "header", &h);
rc = rc < 0 ? rc : serialize_DeleteRequest(oa, "req", &req);
enter_critical(zh);
/* 添加异步接口回调数据。 */
rc = rc < 0 ? rc : add_void_completion(zh, h.xid, completion, data);
/* 将数据包的序列化数据写入发送队列。 */
rc = rc < 0 ? rc : queue_buffer_bytes(&zh->to_send, get_buffer(oa), get_buffer_len(oa));
leave_critical(zh);
free_duplicate_path(req.path, path);
/* We queued the buffer, so don't free it */
close_buffer_oarchive(&oa, 0);
LOG_DEBUG(LOGCALLBACK(zh), "Sending request xid=%#x for path [%s] to %s", h.xid, path, zoo_get_current_server(zh));
/* make a best (non-blocking) effort to send the requests asap */
/* 发包。 */
adaptor_send_queue(zh, 0);
return (rc < 0) ? ZMARSHALLINGERROR : ZOK;
}
吐槽一下:
这个 lib 的异步是假异步,异步接口到处都是锁,回调函数由回调线程调用,即便调用异步接口,整个进程仍然都是多线程操作,并非单进程单线程的异步。所以这个 lib 从开始设计就只适合于多线程环境使用。
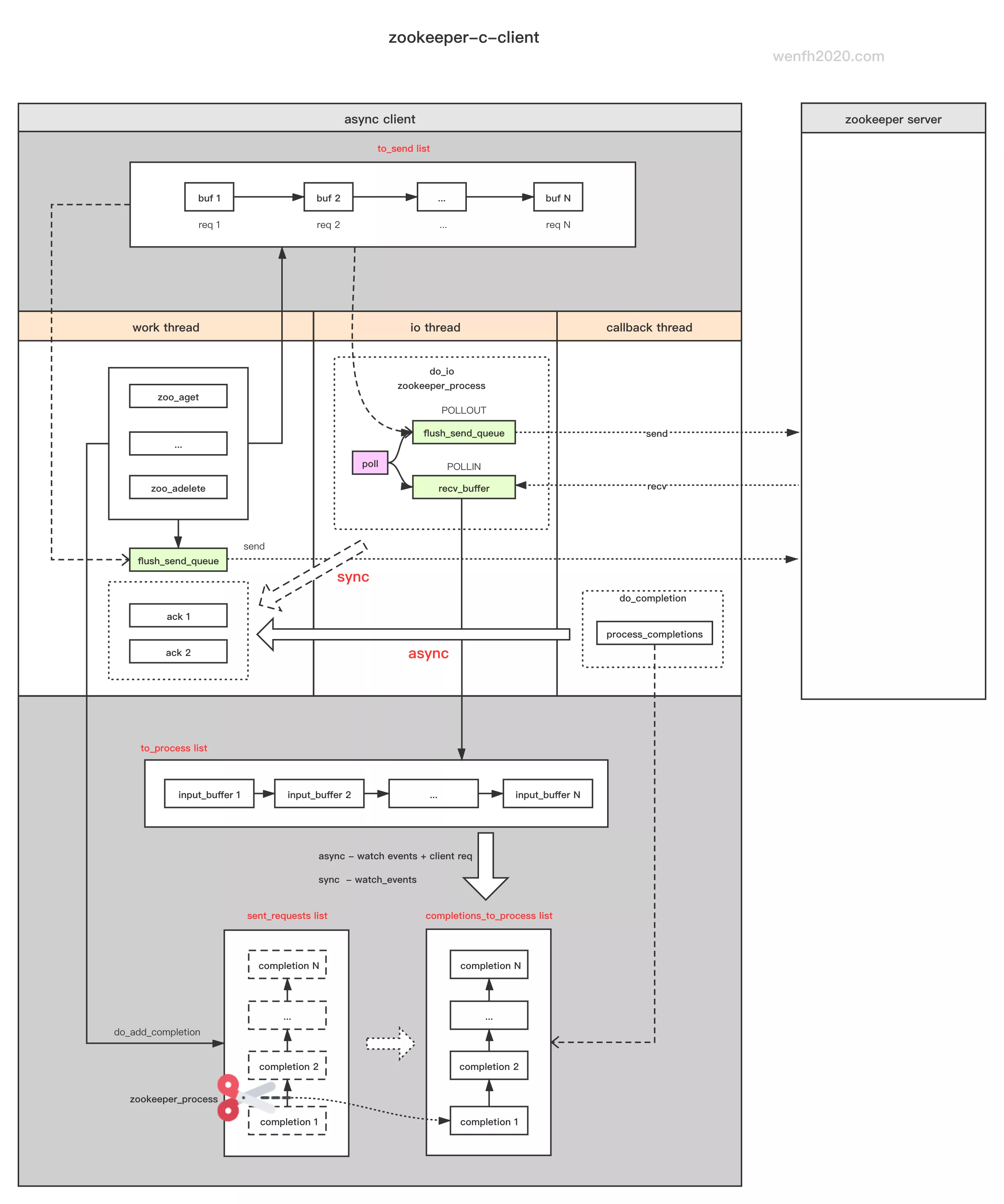
3.3. 异步网络 IO
逻辑在网络线程中实现。
- 连接 zk 服务的 socket 被设置异步
O_NONBLOCK非阻塞。 - 网络 IO 事件通过
poll进行管理。 - 发送请求数据到 zk 服务;接收 zk 服务回包。
- 监控网络时间事件回复:
- 异步接口访问,结果将被放进回调队列,等待回调线程处理。
- 同步接口访问,结果将被当前网络线程处理,并唤醒处于休眠状态的调用接口线程。
注意:同步接口使用,编译的时候需要设置多线程编译宏(
THREADED)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
/* mt_adaptor.c
* 网络 IO 线程处理逻辑。*/
void *do_io(void *v) {
zhandle_t *zh = (zhandle_t *)v;
struct pollfd fds[2];
...
while (!zh->close_requested) {
...
/* 创建异步 socket 连接 zookeeper。 */
zookeeper_interest(zh, &fd, &interest, &tv);
if (fd != -1) {
/* 通过 poll 监听 fd 的读写事件。*/
fds[1].fd = fd;
fds[1].events = (interest & ZOOKEEPER_READ) ? POLLIN : 0;
fds[1].events |= (interest & ZOOKEEPER_WRITE) ? POLLOUT : 0;
maxfd = 2;
}
timeout = tv.tv_sec * 1000 + (tv.tv_usec / 1000);
/* 通过 poll 获取当前 fd 读写事件。 */
poll(fds, maxfd, timeout);
if (fd != -1) {
interest = (fds[1].revents & POLLIN) ? ZOOKEEPER_READ : 0;
interest |= ((fds[1].revents & POLLOUT) || (fds[1].revents & POLLHUP)) ? ZOOKEEPER_WRITE : 0;
}
...
/* 处理从 poll 捞出的读写事件。 */
zookeeper_process(zh, interest);
...
}
...
}
/* zookeeper.c
* 创建非阻塞 socket,连接 zk 服务。 */
int zookeeper_interest(zhandle_t *zh, socket_t *fd, int *interest,
struct timeval *tv) {
...
if (*fd == -1) {
...
/* 创建 socket 对象。 */
zh->fd->sock = socket(zh->addr_cur.ss_family, sock_flags, 0);
...
/* 设置 socket 网络通信不延迟。 */
zookeeper_set_sock_nodelay(zh, zh->fd->sock);
/* 设置 socket 非阻塞。 */
zookeeper_set_sock_noblock(zh, zh->fd->sock);
rc = zookeeper_connect(zh, &zh->addr_cur, zh->fd->sock);
...
}
...
}
/* zookeeper.c
* 处理网络读写事件。*/
int zookeeper_process(zhandle_t *zh, int events) {
...
/* 根据 poll 取出的读写事件 events 读写数据。 */
rc = check_events(zh, events);
...
/* 处理 zk 服务回复包逻辑。 */
while (rc >= 0 && (bptr = dequeue_buffer(&zh->to_process))) {
struct ReplyHeader hdr;
struct iarchive *ia = create_buffer_iarchive(
bptr->buffer, bptr->curr_offset);
deserialize_ReplyHeader(ia, "hdr", &hdr);
if (hdr.xid == PING_XID) {
/* 心跳回复。 */
...
} else if (hdr.xid == WATCHER_EVENT_XID) {
/* zk 服务通知监听事件。 */
...
/* 事件放进完成队列(completions_to_process)等待回调线程处理。*/
queue_completion(&zh->completions_to_process, c, 0);
}
...
else {
completion_list_t *cptr = dequeue_completion(&zh->sent_requests);
...
/* 异步方式的回调放进完成队列(completions_to_process)等待回调线程处理。 */
if (cptr->c.void_result != SYNCHRONOUS_MARKER) {
LOG_DEBUG(LOGCALLBACK(zh), "Queueing asynchronous response");
cptr->buffer = bptr;
queue_completion(&zh->completions_to_process, cptr, 0);
} else {
#ifdef THREADED
/* 多线程同步模式,在本线程处理回复包,并唤醒等待的请求接口线程。 */
struct sync_completion
*sc = (struct sync_completion *)cptr->data;
sc->rc = rc;
/* 当前线程同步处理回复包。 */
process_sync_completion(zh, cptr, sc, ia);
/* 唤醒调用接口的线程。*/
notify_sync_completion(sc);
free_buffer(bptr);
zh->outstanding_sync--;
destroy_completion_entry(cptr);
#else
abort_singlethreaded(zh);
#endif
}
}
}
/* 唤醒调用了同步接口,正在睡眠的线程。 */
void notify_sync_completion(struct sync_completion *sc) {
pthread_mutex_lock(&sc->lock);
sc->complete = 1;
pthread_cond_broadcast(&sc->cond);
pthread_mutex_unlock(&sc->lock);
}
/* 处理从 poll 取出的读写事件,将发送队列的数据发出去,将读出来的数据放进处理队列。 */
static int check_events(zhandle_t *zh, int events) {
...
/* 写事件。 */
if (zh->to_send.head && (events & ZOOKEEPER_WRITE)) {
/* 发送数据。 */
int rc = flush_send_queue(zh, 0);
...
}
...
/* 读事件。 */
if (events & ZOOKEEPER_READ) {
int rc;
if (zh->input_buffer == 0) {
zh->input_buffer = allocate_buffer(0, 0);
}
/* 读数据。 */
rc = recv_buffer(zh, zh->input_buffer);
...
if (rc > 0) {
get_system_time(&zh->last_recv);
if (zh->input_buffer != &zh->primer_buffer) {
if (is_connected(zh) || !is_sasl_auth_in_progress(zh)) {
/* 回复包,放进处理队列。 */
queue_buffer(&zh->to_process, zh->input_buffer, 0);
}
...
zh->input_buffer = 0;
}
...
}
3.4. 回调
异步接口实现调用 / 节点监控事件,都是通过异步回调进行通知。异步回调逻辑,在回调线程中实现。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
void *do_completion(void *v) {
...
while (!zh->close_requested) {
...
/* 处理完成事件队列。 */
process_completions(zh);
}
...
}
/* handles async completion (both single- and multithreaded) */
void process_completions(zhandle_t *zh) {
completion_list_t *cptr;
/* 从列表中,拿出一个节点出来出来。 */
while ((cptr = dequeue_completion(&zh->completions_to_process)) != 0) {
struct ReplyHeader hdr;
buffer_list_t *bptr = cptr->buffer;
struct iarchive *ia = create_buffer_iarchive(bptr->buffer, bptr->len);
deserialize_ReplyHeader(ia, "hdr", &hdr);
/* 如果是监控事件,那么进行监控回调。 */
if (hdr.xid == WATCHER_EVENT_XID) {
...
deliverWatchers(zh, type, state, evt.path, &cptr->c.watcher_result);
...
} else {
/* 如果是请求回复,那么回调对应的回调函数。 */
deserialize_response(zh, cptr->c.type, hdr.xid, hdr.err != 0, hdr.err, cptr, ia);
}
...
}
}
4. 小结
- zookeeper-client-c 提供同步异步接口。
- 它是多线程工作方式。两个线程分别是:网络 IO 线程 和 回调处理线程。
- 网络 IO 是异步非阻塞通信。
- 通过
poll管理 fd。
5. 问题
- 异步接口回调,通过回调线程处理。同步接口阻塞在网络线程,当网络请求收到回复,网络线程才会唤醒阻塞。显然异步性能要高于同步,但是同步方式在多线程模式下工作,可以避免逻辑割裂。
- 异步回调方式是通过子线程回调,同步方式也有监控事件通过子线程回调,所以这个回调函数涉及到多线程操作,需要注意回调数据原子性的操作,这个问题隐藏得比较深。
- 这个库是用
poll管理 fd 相关逻辑,所以如果要将库的 fd 取出来绑定到主线程的epoll估计不那么容易。