
走读 Linux 内核源码(5.0.1),理解 epoll 的 lt / et 模式区别:
- 两个模式,事件通知方式不同,lt 持续通知直到处理事件完毕,et 一般只通知一次,不管事件是否处理完毕。
- et 模式,可以使得就绪队列上的新的就绪事件能被快速处理。
- et 模式,可以避免共享 “epoll fd” 场景下,发生类似 惊群问题。
epoll 详细信息参考《[epoll 源码走读] epoll 实现原理》。
1. 原理
1.1. 逻辑
lt/et 模式区别的核心逻辑在 epoll_wait 的内核实现 ep_send_events_proc 函数里,划重点:就绪队列。
epoll_wait 的相关工作流程:
- 当内核监控的 fd 产生用户关注的事件,内核将 fd (
epi)节点信息添加进就绪队列。 - 内核发现就绪队列有数据,唤醒进程工作。
- 内核先将 fd 信息从就绪队列中删除。
- 然后将 fd 对应就绪事件信息从内核空间拷贝到用户空间。
- 事件数据拷贝完成后,内核检查事件模式是 lt 还是 et,如果不是 et,重新将 fd 信息添加回就绪队列,下次重新触发 epoll_wait。
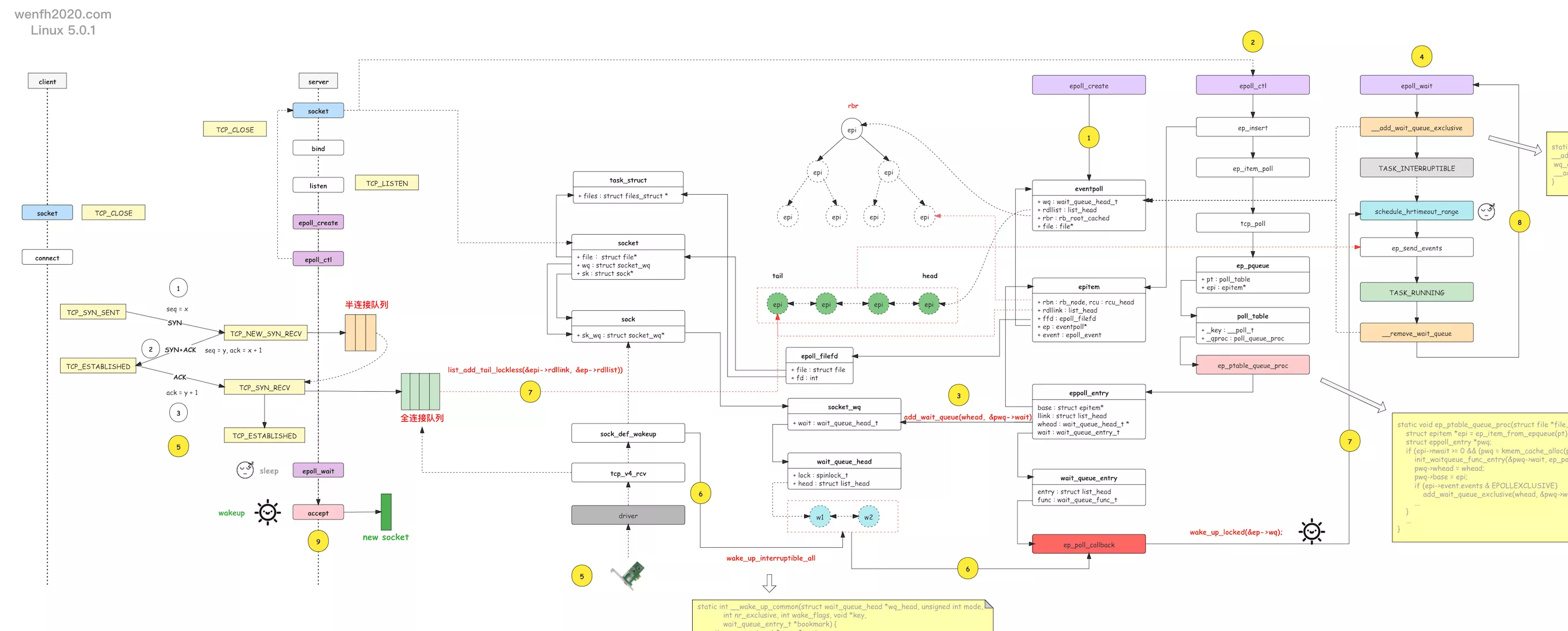
1.2. 源码实现流程
1
2
3
4
5
6
7
8
#------------------- *用户空间* ---------------------------
epoll_wait
#------------------- *内核空间* ---------------------------
|-- do_epoll_wait
|-- ep_poll
|-- ep_send_events
|-- ep_scan_ready_list
|-- ep_send_events_proc
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
/* fs/eventpoll.c */
SYSCALL_DEFINE4(epoll_wait, int, epfd, struct epoll_event __user *, events, int,
maxevents, int, timeout) {
return do_epoll_wait(epfd, events, maxevents, timeout);
}
/* fs/eventpoll.c */
static int do_epoll_wait(int epfd, struct epoll_event __user *events,
int maxevents, int timeout) {
...
error = ep_poll(ep, events, maxevents, timeout);
...
}
/* 检查就绪队列,如果就绪队列有就绪事件,就将事件信息从内核空间发送到用户空间。*/
static int ep_poll(struct eventpoll *ep, struct epoll_event __user *events,
int maxevents, long timeout) {
...
/* 检查就绪队列,如果有就绪事件就进入发送环节。 */
...
send_events:
/* 有就绪事件就发送到用户空间,否则继续获取数据,直到阻塞等待超时。 */
if (!res && eavail && !(res = ep_send_events(ep, events, maxevents)) &&
!timed_out)
goto fetch_events;
...
}
static int ep_send_events(struct eventpoll *ep,
struct epoll_event __user *events, int maxevents) {
struct ep_send_events_data esed;
esed.maxevents = maxevents;
esed.events = events;
/* 遍历事件就绪队列,发送就绪事件到用户空间。 */
ep_scan_ready_list(ep, ep_send_events_proc, &esed, 0, false);
return esed.res;
}
static __poll_t ep_scan_ready_list(struct eventpoll *ep,
__poll_t (*sproc)(struct eventpoll *,
struct list_head *,
void *),
void *priv, int depth, bool ep_locked) {
...
/* 将就绪队列分片链接到 txlist 链表中。 */
list_splice_init(&ep->rdllist, &txlist);
/* 执行 ep_send_events_proc,事件数据从内核空间拷贝到内核空间的逻辑。*/
res = (*sproc)(ep, &txlist, priv);
...
}
static __poll_t ep_send_events_proc(struct eventpoll *ep,
struct list_head *head, void *priv) {
...
/* 遍历处理 txlist(原 ep->rdllist 数据)就绪队列结点,
* 获取事件拷贝到用户空间。 */
list_for_each_entry_safe(epi, tmp, head, rdllink) {
if (esed->res >= esed->maxevents) break;
...
/* 先从就绪队列中删除 epi,如果是 lt
* 模式,就绪事件还没处理完,再把它添加回去。 */
list_del_init(&epi->rdllink);
/* 获取 epi 对应 fd 的就绪事件。 */
revents = ep_item_poll(epi, &pt, 1);
if (!revents) {
/* 如果没有就绪事件就返回(这时候,epi 已经从就绪队列中删除了。) */
continue;
}
/* 内核空间通过 __put_user 向用户空间拷贝传递数据。 */
if (__put_user(revents, &uevent->events) ||
__put_user(epi->event.data, &uevent->data)) {
/* 如果拷贝失败,将 epi 重新保存回就绪队列,以便下一次处理。 */
list_add(&epi->rdllink, head);
ep_pm_stay_awake(epi);
if (!esed->res) {
esed->res = -EFAULT;
}
return 0;
}
/* 增加成功处理就绪事件的个数。 */
esed->res++;
uevent++;
if (epi->event.events & EPOLLONESHOT)
/* #define EP_PRIVATE_BITS (EPOLLWAKEUP | EPOLLONESHOT | EPOLLET |
* EPOLLEXCLUSIVE) */
epi->event.events &= EP_PRIVATE_BITS;
else if (!(epi->event.events & EPOLLET)) {
/* lt 模式,重新将前面从就绪队列删除的 epi 添加回去。
* 等待下一次 epoll_wait 调用,重新走上面的逻辑。
* et 模式,前面从就绪队列里删除的 epi 将不会被重新添加,
* 直到用户关注的事件再次发生。*/
list_add_tail(&epi->rdllink, &ep->rdllist);
ep_pm_stay_awake(epi);
}
}
return 0;
}
2. 区别
2.1. 通知
通过阅读 ep_send_events_proc 源码,最大区别就是,事件通知。
当用户关注的 fd 事件发生时,et 模式,只通知用户一次,不管这个事件是否已经被用户处理完毕,直到该事件再次发生,或者用户通过 epoll_ctl 重新关注该 fd 对应的事件;而 lt 模式,会不停地通知用户,直到用户把事件处理完毕。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
static __poll_t ep_send_events_proc(struct eventpoll *ep,
struct list_head *head, void *priv) {
...
/* 遍历处理 txlist(原 ep->rdllist 数据)就绪队列结点,获取事件拷贝到用户空间。 */
list_for_each_entry_safe(epi, tmp, head, rdllink) {
if (esed->res >= esed->maxevents) break;
...
/* 先从就绪队列中删除 epi。*/
list_del_init(&epi->rdllink);
/* 获取 epi 对应 fd 的就绪事件。 */
revents = ep_item_poll(epi, &pt, 1);
if (!revents)
/* 如果没有就绪事件,说明就绪事件已经处理完了,就返回。(这时候,epi
* 已经从就绪队列中删除了。) */
continue;
...
else if (!(epi->event.events & EPOLLET)) {
/* lt 模式,前面删除掉了的就绪事件节点,重新追加到就绪队列尾部。*/
list_add_tail(&epi->rdllink, &ep->rdllist);
...
}
}
return 0;
}
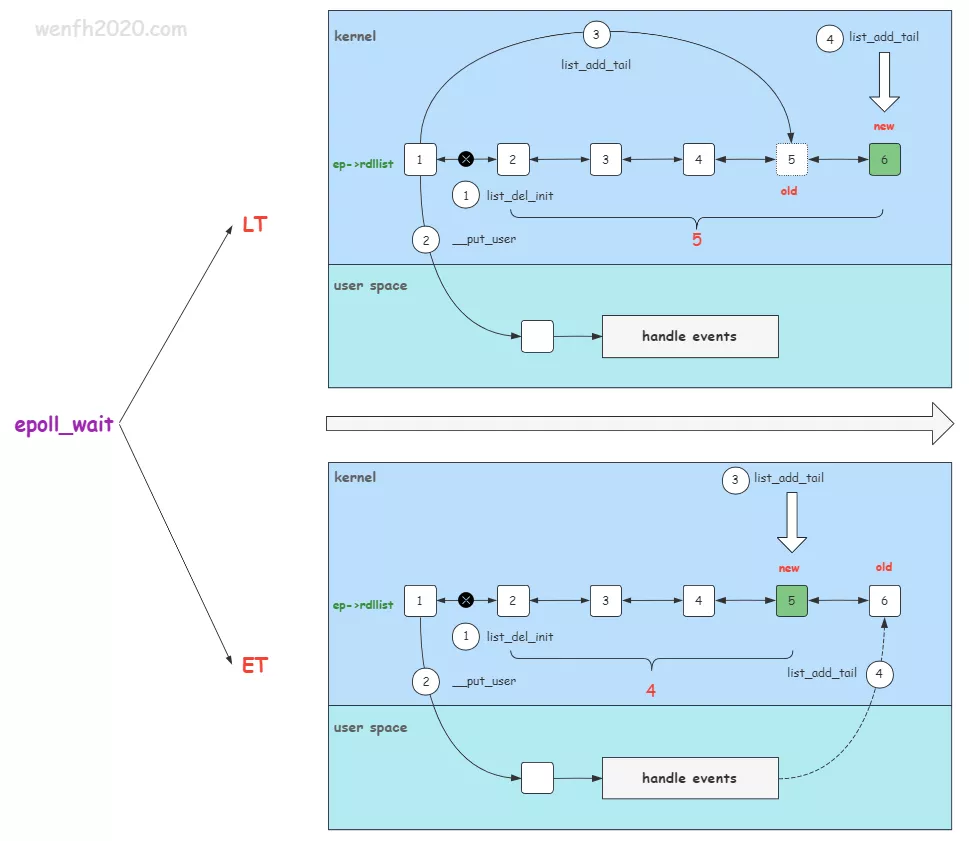
2.2. 快速处理
为什么说 et 模式会使得新的就绪事件能快速被处理呢?可以看下图 epoll_wait 的工作时序,假如 epoll_wait 每次最大从内核取一个事件。
如果是 lt 模式,epi 节点刚开始在内核被删除,然后数据从内核空间拷贝到用户空间后,内核马上将这个被删除的节点重新追加回就绪队列,这个速度很快,所以后面来的新的就绪事件很大几率会排在已经处理过的事件后面。
而 et 模式呢,数据从内核拷贝到用户空间后,内核不会重新将就绪事件节点添加回就绪队列,当事件在用户空间处理完后,用户空间根据需要重新将这个事件通过 epoll_ctl 添加回就绪队列(又或者这个节点因为有新的数据到来,重新触发了就绪事件而被添加)。从节点被删除到重新添加,这中间的过程是比较“漫长”的,所以新来的其它事件节点能排在旧的节点前面,能快速处理。
这个道理有点像排队打饭,一个队列上,有些同学要打包两份饭,如果每次只能打包一份,lt 模式就是,这些同学打包了一份之后,马上重新回去排队,再打一份。et 模式是,这些同学先打包一份,然后拿回去吃掉了,再回来排队,在高峰期显然整个排队的效率和结果不一样。
不要小看这个处理时序,在高并发系统里,海量事件,每个后来者都希望自己的事件快点被处理,而 et 模式可以一定程度上提高新事件被处理的速度。
同时如果我们仔细观察服务程序的 listen 接口,它有一个 backlog 参数,代表 listen socket 就绪链接的已完成队列的长度,这说明队列是有限制的,当它满了就会返回错误给客户端,所以完全队列的数据当然越快得到处理越好。
所以我们可以观察一下 nginx 的 epoll_ctl 系统调用,除了 listen socket 的操作是 lt 模式,其它的 socket 处理几乎所有都是 et 模式。
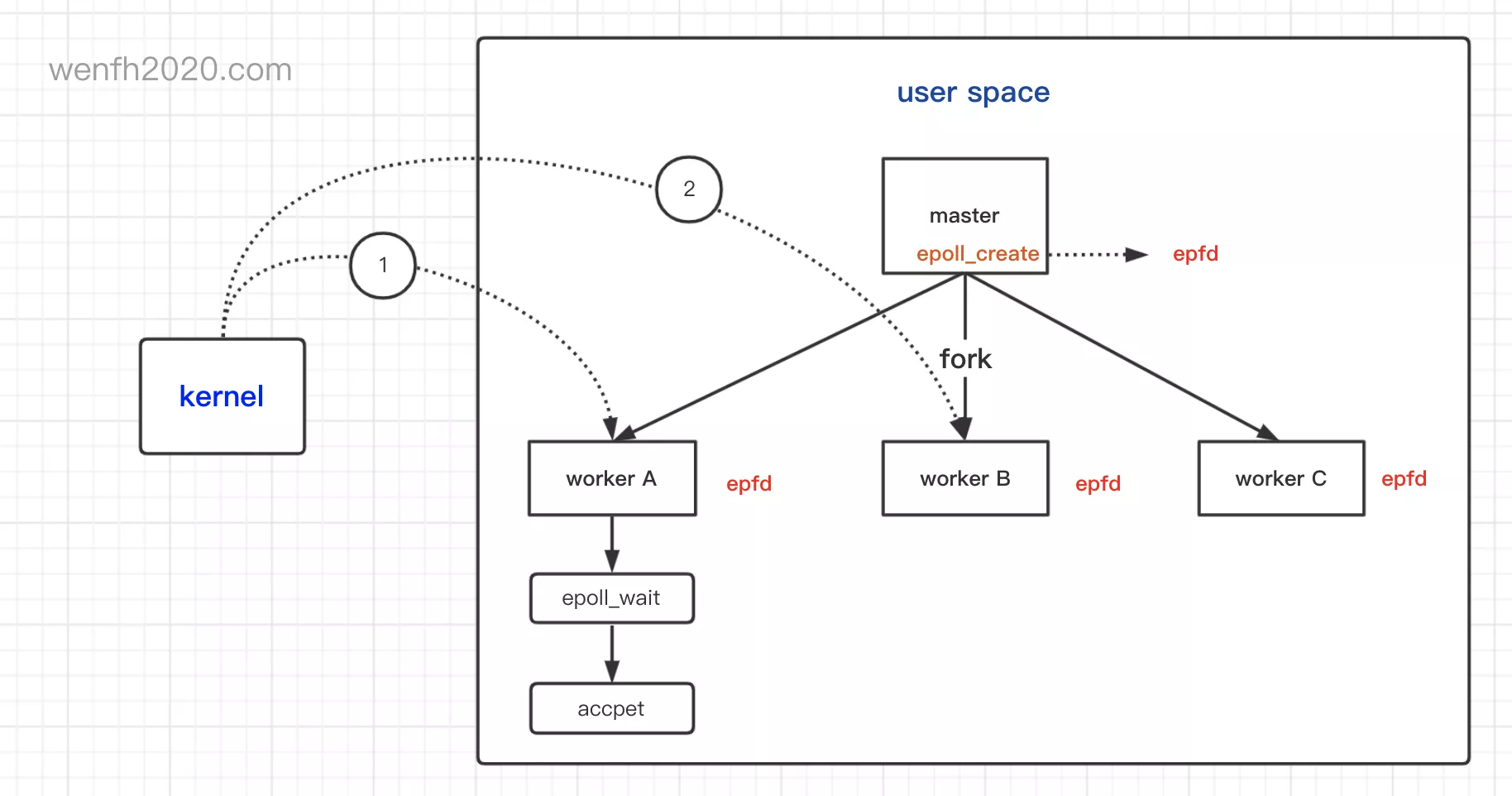
2.3. 类似惊群问题
我们仔细看 ep_scan_ready_list 源码,当 ep->rdllist 不为空时,会唤醒进程。
当多个进程共享同一个 “epoll fd” 时,多个进程同时在等待资源,也就是多个进程通过 epoll_wait 将自己当前进程的等待事件挂在内核 epoll 实例 eventpoll.wq 等待队列上,换句话说,eventpoll.wq 等待队列上挂着多个多个进程的等待事件,当某个事件触发时,等待队列上的进程会被唤醒。
如果是 lt 模式,epoll 在下一个 epoll_wait 执行前,fd 事件节点仍然会存在就绪队列中,不管事件是否处理完成,那么唤醒进程 A 处理事件时,如果 B 进程也在等待资源,那么同样的事件有可能将 B 进程也唤醒处理,然后 B 又是同样的逻辑唤醒 C —— 连环唤醒问题,这种情况可能是用户不愿意看到的。
- 惊群现象。
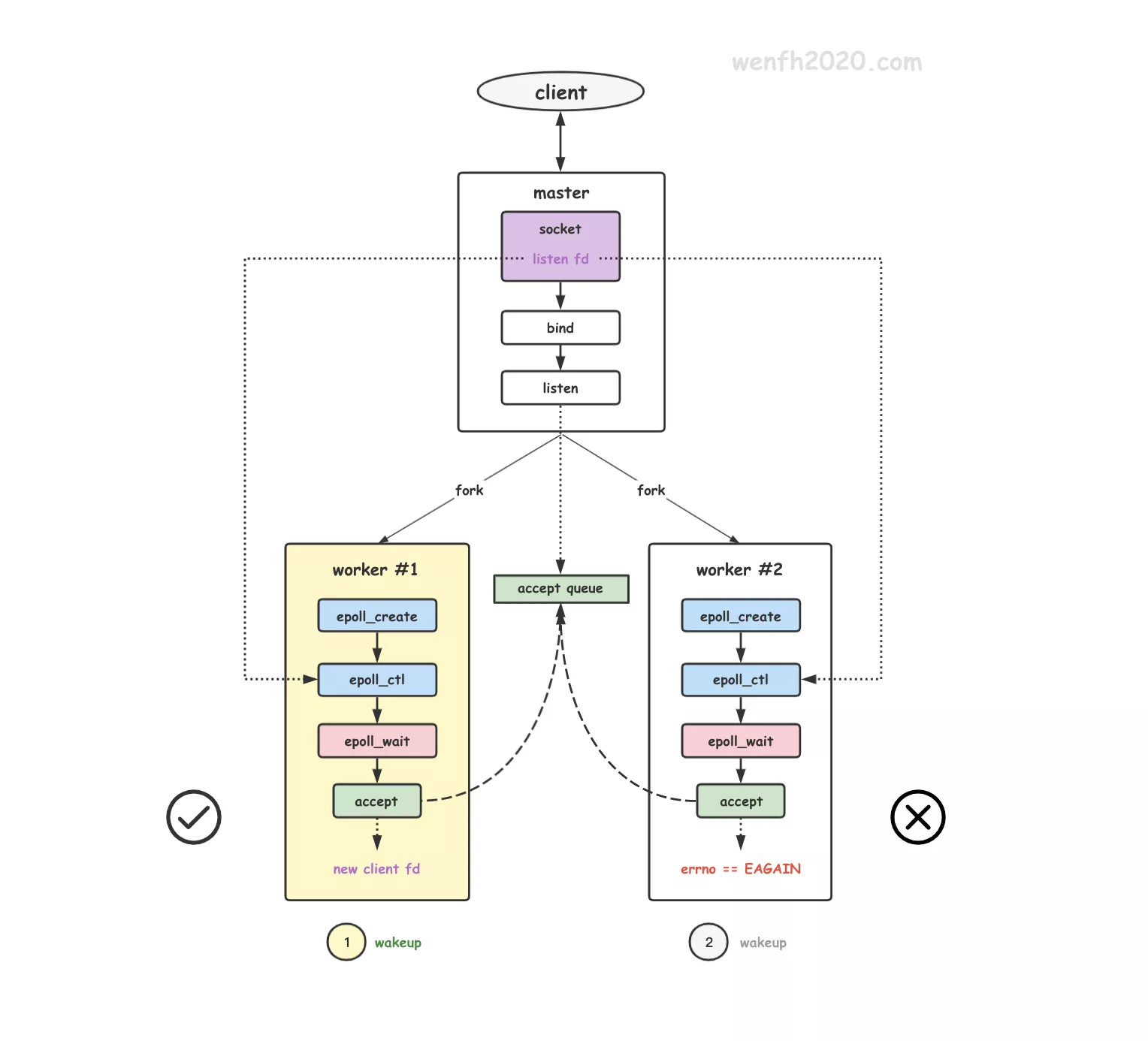
- lt 模式连环唤醒。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
/* epoll_wait 执行逻辑。 */
static int ep_poll(struct eventpoll *ep, struct epoll_event __user *events,
int maxevents, long timeout) {
...
/* epoll_wait 处理就绪事件前,先添加等待唤醒事件。 */
if (!waiter) {
waiter = true;
/* current 是当前进程。 */
init_waitqueue_entry(&wait, current);
spin_lock_irq(&ep->wq.lock);
__add_wait_queue_exclusive(&ep->wq, &wait);
spin_unlock_irq(&ep->wq.lock);
}
...
/* 如果就绪队列没有就绪事件了,那么进程进入睡眠状态,等待唤醒。 */
for (;;) {
/* 进程设置为可中断睡眠状态。 */
set_current_state(TASK_INTERRUPTIBLE);
...
eavail = ep_events_available(ep);
if (eavail)
break;
...
/* 没有就绪事件了,超时阻塞睡眠,等待唤醒。 */
if (!schedule_hrtimeout_range(to, slack, HRTIMER_MODE_ABS)) {
timed_out = 1;
break;
}
}
/* 进程设置为唤醒状态。 */
__set_current_state(TASK_RUNNING);
...
/* 就绪队列有事件,处理就绪事件逻辑。 */
if (!res && eavail &&
!(res = ep_send_events(ep, events, maxevents)) && !timed_out)
goto fetch_events;
...
/* 处理完逻辑,从等待唤醒事件队列,删除自己的等待事件。 */
if (waiter) {
spin_lock_irq(&ep->wq.lock);
__remove_wait_queue(&ep->wq, &wait);
spin_unlock_irq(&ep->wq.lock);
}
...
}
static int ep_send_events(struct eventpoll *ep,
struct epoll_event __user *events, int maxevents) {
struct ep_send_events_data esed;
esed.maxevents = maxevents;
esed.events = events;
/* 遍历事件就绪队列,发送就绪事件到用户空间。 */
ep_scan_ready_list(ep, ep_send_events_proc, &esed, 0, false);
return esed.res;
}
static __poll_t ep_scan_ready_list(struct eventpoll *ep,
__poll_t (*sproc)(struct eventpoll *,
struct list_head *, void *),
void *priv, int depth, bool ep_locked) {
...
/* 将就绪队列分片链接到 txlist 链表中。 */
list_splice_init(&ep->rdllist, &txlist);
/* 执行 ep_send_events_proc,唤醒进程 A。 */
res = (*sproc)(ep, &txlist, priv);
...
if (!list_empty(&ep->rdllist)) {
if (waitqueue_active(&ep->wq))
/* A 进程已被唤醒,但是就绪队列(ep->rdllist)还有数据,
* 进程 B,也在等待队列中,那么唤醒进程 B。 */
wake_up_locked(&ep->wq);
...
}
...
}
3. 小结
- epoll 的 lt / et 模式实现逻辑在内核的 epoll_wait 里。
- epoll_wait 的关键数据结构是事件就绪队列。
- lt / et 模式区别主要有:通知方式,新事件快速处理,避免类似惊群问题。
4. 后记
使用 epoll 已经很长时间了,一直困扰着 lt / et 模式的区别,直到深入阅读内核源码后,才慢慢地理解它的工作原理,其实逻辑不是想象的那么复杂,可见阅读内核源码的重要性!
最近花了不少力气,将内核的 调试环境 搭建起来了,边看内核源码,边调试验证逻辑,一个字:爽啊 😁!